したがって、3点の座標を与える、合計9個の値が必要となるが、このうち3個は、
これら3点から、任意の2点を選んで結んだ線分の長さが、剛体の位置にかかわらず一定であること、すなわち、
(xA-xB)2+(yA-yB)2+(zA-zB)2=cAB
(xB-xC)2+(yB-yC)2+(zB-zC)2=cBC
(xC-xA)2+(yC-yA)2+(zC-zA)2=cCA
から決定されるから、独立な座標の個数は、6個となる
したがって、剛体が何の拘束もなしに自由に動かしうる場合、その自由度は、6、ということになる
剛体の1点が固定されている場合は、その1点を与える座標値3個が指定されるから、自由度は、3、となり、
同様に、剛体がひとつの軸によって固定されている場合は、その軸まわりの回転角のみが独立、すなわち、自由度、1、となる
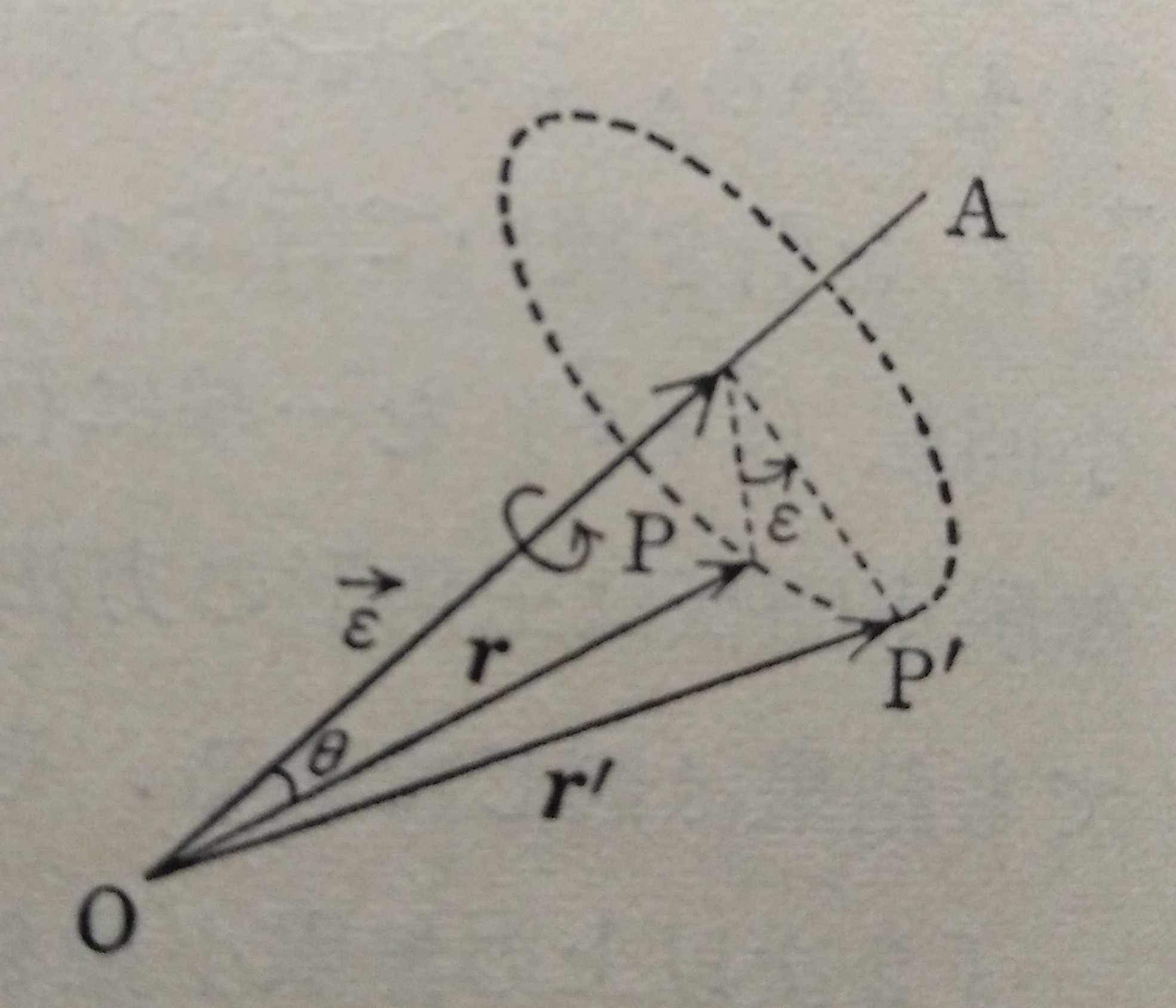
点のまわりの回転変位は、その点を通る1つの軸のまわりの回転によって達せられる
有限の大きさを持つ回転変位は、加法に関する交換法則が成り立たないため、ベクトルとは言えない
しかし、無限小回転においては、近似的にベクトルと扱いうる

ただし、ベクトル三重積は
角運動量の法則(ある時刻における質点の角運動量の時間的変化の割合は、その時刻に質点に作用する力の、原点に関するモーメントに等しい)
さらに、「慣性主軸」を座標軸に取れば、慣性乗積はすべて0となるので、ここから「オイラーの運動方程式」が得られる
対象軸上の固定点に関する外力のモーメントNが0である場合、かつ、剛体の対称軸をz軸にとれば、
Ixx=Iyyである
また、第3式から、ωzが定数であることがわかるので、これをnとおき、また、βを次のように定めると、
すなわち、角速度ベクトルωの終点は、z軸に垂直な平面内の半径aの円周上を、一定の角速度βnで回転することがわかった、これを「歳差運動」と呼ぶ